


イノベーション自動運転キャリアダンプ

自動運転クローラダンプ人体検知システム「T-iROBO® Crawler Carrier」
実用化により安全性を確保しながら、運搬作業の自動化
当社と大成建設株式会社は共同で、諸岡社製クローラダンプ MST-2200VDR をベースマシンとして人体検知システム ※1 を搭載した自動運転クローラダンプ「T-iROBO Crawler Carrier」を開発し、安全性の 確保と運搬作業の自動化に関する検証試験を行い、実用化に目途をつけました。
生産労働人口の減少や高齢化が社会的な問題となる中、生産性向上や人手不足の解消は、 建設産業においても大きな課題となっています。そのため、近年、国土交通省が推進している i-Construction において、様々な ICT の活用により、建設現場での生産性は徐々に向 上してきていますが、今後、深刻化が予想される人手不足に対応するためには、更なる生 産性向上への取り組みを加速する必要性があります。中でも建設機械の自動化技術は、建設現場で早期に確立が望まれる技術の一つです。
このような背景から、大成建設は、2013 年より無人で作業を行う建設機械「T-iROBO」※ 2 の開発に取り組んできました。今回開発した「T-iROBO Crawler Carrier」は、土砂を指 定ルートで運搬し、指定場所で排土したのち、再度積み込み場所へ戻る一連の運搬作業を全て自動で行う建設機械です。両社は、当該機械の機能について実際の造成現場で検証を行い、その動作状況を確認しました。
本建設機械の主な特徴と検証結果は以下のとおりです。
自動運転試験状況

1. 走行ルートを「座標入力」や「ティーチング」により指定
走行ルートは、出発点・到着点などの走行路の座標入力や一度有人走行させたルートを記憶させるティーチングにより指定することができます。
走行路が複雑に入り組む場合などには、走行路のティーチングによるトレース走行が有効です。
検証試験では、造成現場内の走行路(L=200m)において自動運転により土砂運搬作業を行った結果、平均時速5km/h、1時間当たりの搬送能力7~8回分(合計約40m3)の作 業ができることを確認しました。
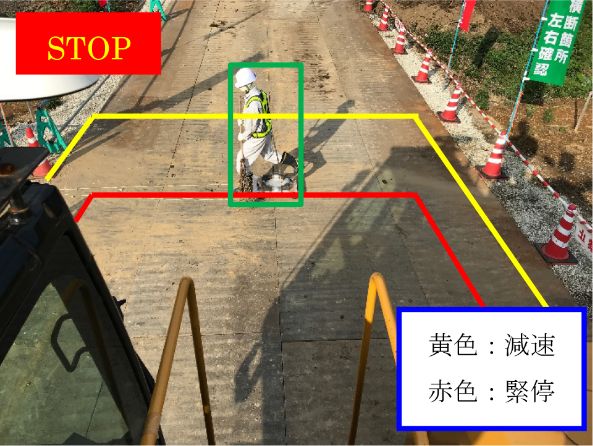
2. 人体を検知し、自動停止
自動車等でも実用化されている人工知能(AI)を活用した画像処理技術を活用し、搭載カメラおよびセンサーにより走行路内で認識した人体との距離に応じて、自動で「減速(標準設定値6m)」または「緊急停止(標準設定値3m)」します。また、搭載カメラの画像から人体の姿が見えなくなると、5秒後に自動運転を再開します。
検証試験では走行路に設置した人形を検知して、減速・緊急停止できることを確認しました。

人体検知システム試験状況(人形を使用して実施)
3. 障害物を検知し、迂回走行または自動停止
人体検知と同様の技術により、走行路内の障害物を検知して、走行可能な広さがある場合は自動で迂回走行し、回避できない場合は自動停止します。
障害物が除去されるまで停止状態を継続します。
検証試験では、障害物を自動で回避または停止する機能を確認しました。
4. 第5世代通信システム(5G)に対応
本建設機械は、運搬作業や安全性に関わる様々な情報を5G通信システムにより送受信することが可能です。
検証試験では、可搬型5G設備を用いた自動運転を行い、5G通信システムの適用が可能であることを確認しました。
お客様のメリット
遠隔地からでも建設現場の状況をリアルタイムに確認できます。
建設機械の制御や安全監視などが可能です。
技術の特徴
本技術では、局地的に電波品質の高い5Gを提供できる可搬型設備を用いることで、5G通信の特徴である高速・大容量・超低遅延・多数同時接続の通信環境をフル活用し、建設機械の無人化・自動化を実現できます。
今後、両社は実現場において本技術の検証を継続し、高度な自動化および他の建設機械 との自動連携を視野に入れた技術開発を進め、さらなる自動化技術の確立を目指してまいります。
※1 人体検知システム(自動走行システム)
クローラダンプに搭載された人体検知システムおよび自動走行システムは、家電総合メーカーパナソニック株式会社の関連会社である、パナソニック アドバンストテクノロジー株式会社のモビリティー技術を活用している。同社は、2011年に発行された自動車機能安全規格ISO26262において、2012年にASIL-D(Automotive Safety Integrity Level:自動車安全水準の最高ランクD)を認定取得している。モビリティー技術以外に住宅、医療、ロボティクス、セキュリティ分野での技術開発、事業展開にも取り組んでいる。
※2 T-iROBO®シリーズ
人とロボットの協働を目的として、大成建設が開発した作業用ロボットシリーズを示す。建設機械に搭載するシステムには、振動ローラーが施工位置を把握しながら、自ら判断して自動で転圧作業を行う転圧走行無人化施工システム「T-iROBO® Roller」、割岩したい岩を指定するだけで建設機械が自ら判断して岩に接近し、自動で破砕する割岩無人化施工システム「T-iROBO® Breaker」、ピット内の土砂と積込機を認識して自動的に掘削積込を行う無人化施工システム「T-iROBO® Excavator」がある。



